
文字
背景
行間


掲示板
高校生未来の職業人育成事業
高校生未来の職業人育成事業2日目
11月6日(木)、高校生未来の職業人育成事業2日目として、人に役立つものづくりをテーマに、機械科3年生の課題研究班が取り組みました。
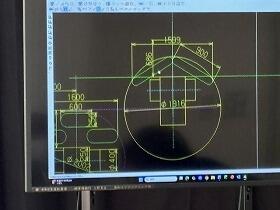
前回ご助言いただいた点について検討した結果、実現性を第一に考え「体育館の床を清掃するロボット」を製作することになりました。開発段階に応じた設計、製作、制御の手法について、(株)アオキシンテックCEO青木圭太様からご指導いただきました。製作について、設計班、製作班、制御プログラム班に分かれて検討を進めました。設計にはCADを使い、機体の動作する回転半径、センサーの配置、固定方法を確認することについてご助言いただきました。
今後は、今回の検討を踏まえ、各班がそれぞれの役割を果たし製作、組立、試運転に移行できるように取り組みます。



令和7年度高校生未来の職業人育成事業3日目
11月20日(木)、高校生未来の職業人育成事業3日目として、「人に役立つものづくり」をテーマに、機械科3年生の課題研究班が取り組みました。
今回は、会議室で試験走行を行い、2つの項目について(株)アオキシンテックCEO青木圭太様からご助言をいただきました。
・機体の構造と走行方向、モップの配置、センサの固定などハードウェアについて
・追従機能と基本走行の精度について
実現性を第一に考え「体育館の床を清掃するロボット」を試作してきました。モップの固定方法、追従機能・センサの位置・固定方法、制御プログラムなど、さらに検討して作りこむ必要があることや機体の基本性能として直線走行の精度を確認することなどをご指摘をいただきました。残された時間で製作班、制御プログラム班に分かれて効率よく製作するとよいなど、今回の会議を通して改めて理解することできました。今回のご助言を基にさらに改良してまいります。
これまで3日間ご指導いただいた青木様に感謝申し上げます。






登校申出書の様式
真心工房のご案内

お知らせ
学校案内パンフレット完成しました。こちらをご覧ください。
(女子向けパンフ監修:宇都宮メディア・アーツ専門学校ビジュアルデザイン科)
女子生徒向け↓
一般向け↓

真工高の四季