
文字
背景
行間


生産機械科3年 自動制御実習
生産機械科実習紹介
本日5/10(月)は生産機械科3年生で実習が行われました。今回は「自動制御実習」4週目の様子をご紹介します。
今回はロボットアームを用いて、ワーク(材料)を台からコンベア上に移動させるためのプログラムについて学習しました。
ロボットアームはPTP(Point to Point)制御を用いて制御を行います。6つの軸を動かしながら、任意の位置(Point)をいくつか設定し、順番にたどっていく制御方法です。
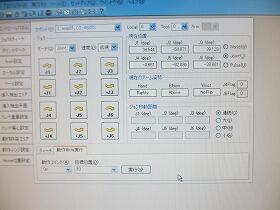
操作画面
下図が制御した時の動作です。製造ラインにおいてもこのような制御によってロボットアームを使用しています。
動作確認の様子
次回は5/11(火)生産機械科2年生の実習をご紹介いたします。
本日5/10(月)は生産機械科3年生で実習が行われました。今回は「自動制御実習」4週目の様子をご紹介します。
今回はロボットアームを用いて、ワーク(材料)を台からコンベア上に移動させるためのプログラムについて学習しました。
ロボットアームはPTP(Point to Point)制御を用いて制御を行います。6つの軸を動かしながら、任意の位置(Point)をいくつか設定し、順番にたどっていく制御方法です。
操作画面
下図が制御した時の動作です。製造ラインにおいてもこのような制御によってロボットアームを使用しています。
動作確認の様子
次回は5/11(火)生産機械科2年生の実習をご紹介いたします。


真心工房のご案内

お知らせ
学校案内パンフレット完成しました。こちらをご覧ください。
(女子向けパンフ監修:宇都宮メディア・アーツ専門学校ビジュアルデザイン科)
女子生徒向け↓
一般向け↓

真工高の四季