
文字
背景
行間


生産機械科3年 自動制御実習 4週目
生産機械科実習紹介
本日は生産機械科3年「自動制御実習」の4週目についてご紹介します。この実習では、「PLCを用いたシーケンス制御」と「ロボットアームの制御」について1つの班が2手に分かれて実習を行いました。
今回はロボットアームの制御についてご紹介いたします。本校の生産機械科では、EPSON製のロボットアームを用いて実習を行います。
下図のようにポイントをいくつか設定し、順番にポイントからポイントへ移動する「PTP制御」(Point to Point 制御)という制御方法を用います。
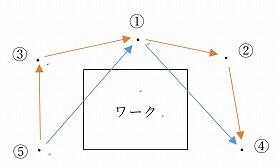
PTP制御について
ロボットアームを駆動させる6つの軸の動きを考えながら、ポイントを設定していきます。今回は下図のように、ロボットアームを用いて、ワーク(材料)を台の上からコンベアへと移動させるためのポイントを考え、プログラムしました。
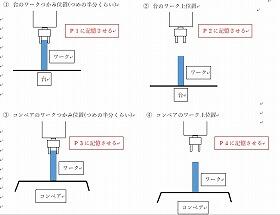
今回指示するポイントについて
ロボットアームやコンベアなどの生産機械を自ら制御することによって、生産システムの自動化について理解を深めた様子でした。

ロボットアームの軸について検討する様子
本日は生産機械科3年「自動制御実習」の4週目についてご紹介します。この実習では、「PLCを用いたシーケンス制御」と「ロボットアームの制御」について1つの班が2手に分かれて実習を行いました。
今回はロボットアームの制御についてご紹介いたします。本校の生産機械科では、EPSON製のロボットアームを用いて実習を行います。
下図のようにポイントをいくつか設定し、順番にポイントからポイントへ移動する「PTP制御」(Point to Point 制御)という制御方法を用います。
PTP制御について
ロボットアームを駆動させる6つの軸の動きを考えながら、ポイントを設定していきます。今回は下図のように、ロボットアームを用いて、ワーク(材料)を台の上からコンベアへと移動させるためのポイントを考え、プログラムしました。
今回指示するポイントについて
ロボットアームやコンベアなどの生産機械を自ら制御することによって、生産システムの自動化について理解を深めた様子でした。
ロボットアームの軸について検討する様子


真心工房のご案内

お知らせ
学校案内パンフレット完成しました。こちらをご覧ください。
(女子向けパンフ監修:宇都宮メディア・アーツ専門学校ビジュアルデザイン科)
女子生徒向け↓
一般向け↓

真工高の四季