
文字
背景
行間

2021年5月の記事一覧
図書館月例イベント「よみくじ」
投稿日時 : 2021/05/12
 図書部
図書部
今年度から、図書館月例イベント「よみくじ」を開催しています。
よみくじとは・・・
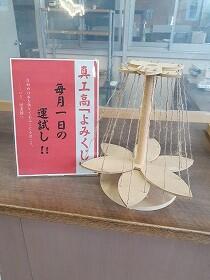
毎月1日(土日祝日の場合は翌日)の昼休みに、本を借りると1回引けるその月の運勢を占うものです。読書の「読」と「おみくじ」を掛けて「よみくじ」と名付けました。
建設科3年,2年の有志生徒により、よみくじ結び所も作成しました。
この結び所がいっぱいになることを楽しみにしています。
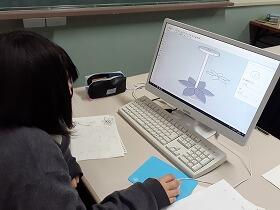
デザインを考え、3D CADによる設計の様子。
実際に加工している様子。
ぜひ、図書館を利用し、たくさんの本を読んでください。

生産機械科2年 機械仕上実習 1週目
生産機械科2年実習紹介!!
本日は生産機械科2年において実習が行われました。
今回は「機械仕上実習」の1週目についてご紹介いたします。
機械仕上実習では旋盤を使い普通旋盤技能検定3級課題のオス材を練習します。
本日はオス材片側の外周を粗加工し(大まかに削り)、段々になっている1段だけ仕上加工を行いました。
最後に段になっている角が尖っていて(バリがあり)危ないので、糸面取り(少しだけ角を削る)を行いました。

外周仕上加工の様子
次回は5月14日(金)に生産機械科1年の工業技術基礎についてご紹介いたします。
生産機械科3年 自動制御実習
生産機械科実習紹介
本日5/10(月)は生産機械科3年生で実習が行われました。今回は「自動制御実習」4週目の様子をご紹介します。
今回はロボットアームを用いて、ワーク(材料)を台からコンベア上に移動させるためのプログラムについて学習しました。
ロボットアームはPTP(Point to Point)制御を用いて制御を行います。6つの軸を動かしながら、任意の位置(Point)をいくつか設定し、順番にたどっていく制御方法です。
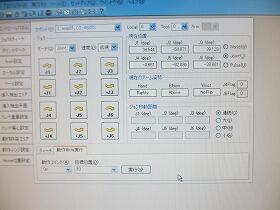
操作画面
下図が制御した時の動作です。製造ラインにおいてもこのような制御によってロボットアームを使用しています。
動作確認の様子
次回は5/11(火)生産機械科2年生の実習をご紹介いたします。
本日5/10(月)は生産機械科3年生で実習が行われました。今回は「自動制御実習」4週目の様子をご紹介します。
今回はロボットアームを用いて、ワーク(材料)を台からコンベア上に移動させるためのプログラムについて学習しました。
ロボットアームはPTP(Point to Point)制御を用いて制御を行います。6つの軸を動かしながら、任意の位置(Point)をいくつか設定し、順番にたどっていく制御方法です。
操作画面
下図が制御した時の動作です。製造ラインにおいてもこのような制御によってロボットアームを使用しています。
動作確認の様子
次回は5/11(火)生産機械科2年生の実習をご紹介いたします。
生産機械科1年 旋盤実習2週目
投稿日時 : 2021/05/07
 生産機械科
生産機械科
生産機械科工業技術基礎紹介
本日 5 / 7 (金)は生産機械科1年生で工業技術基礎が行われました。今回は「旋盤作業」2週目の様子をご紹介します。
2週目となる今回はバイトの高さ合わせから学びました。高さ合わせとはバイトの下に敷板を入れ、高さを調整する作業です。

バイトの高さ合わせの様子

中心に対してバイトが低い状態(調整前)

バイトの高さ調整後

工具取り付けの様子
この後、実際に旋盤を動かして切削を行い、清掃の仕方まで学びました。

外形切削の様子
次回は5/10(月)生産機械科3年生の実習をご紹介いたします。

カウンタ
2
7
0
0
6
8
1
電気・電子研究委員会より (関電研)
令和 6 年度の電気電子研究委員会に
おいて、今年度も真岡工業高校が事
務局となります。
よろしくお願いいたします。
真心工房のご案内

お知らせ
学校案内パンフレット完成しました。こちらをご覧ください。
(女子向けパンフ監修:宇都宮メディア・アーツ専門学校ビジュアルデザイン科)
女子生徒向け↓
一般向け↓

真工高の四季