
文字
背景
行間


2021年9月の記事一覧
生産機械科2年 制御実習 7週目
生産機械科2年 実習紹介!!
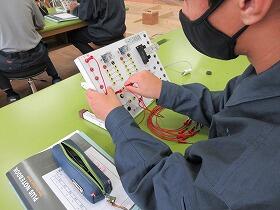
本日は生産機械科2年において実習が行われました。今回は「制御実習」の7週目の様子についてご紹介いたします。
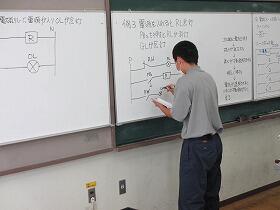
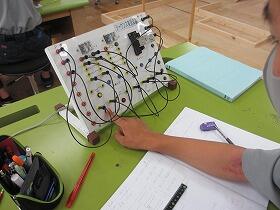
今回は「インターロック回路」「タイマ回路」の復習と応用を学習しました。
インターロック回路
クイズ番組の早押しボタンのような、
1つが動作していると他のものが動作しないようにする回路です。
今回は4つのボタンと4つのランプを使い早押しボタンを作り学習しました。
タイマ回路
タイマサイクル回路やフリッカ回路の復習を行いました。

タイマサイクル回路
(ボタンを押すとランプが1秒ずつ光っていき最後に全消灯)
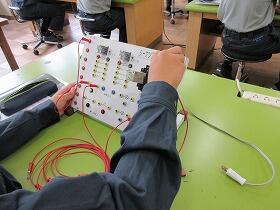
今回まで計7週間でPLCプログラムや機器の操作方法について学習しました。
来年度、3年生ではPCを使用したプログラム書き込みを行います。
さて、次回は10月1日(金)に生産機械科1年の工業技術基礎をご紹介いたします。
本日は生産機械科2年において実習が行われました。今回は「制御実習」の7週目の様子についてご紹介いたします。
今回は「インターロック回路」「タイマ回路」の復習と応用を学習しました。
インターロック回路
クイズ番組の早押しボタンのような、
1つが動作していると他のものが動作しないようにする回路です。
今回は4つのボタンと4つのランプを使い早押しボタンを作り学習しました。
タイマ回路
タイマサイクル回路やフリッカ回路の復習を行いました。
タイマサイクル回路
(ボタンを押すとランプが1秒ずつ光っていき最後に全消灯)
今回まで計7週間でPLCプログラムや機器の操作方法について学習しました。
来年度、3年生ではPCを使用したプログラム書き込みを行います。
さて、次回は10月1日(金)に生産機械科1年の工業技術基礎をご紹介いたします。
生産機械科1年 高大連携
生産機械科1年 高大連携実施
本日は生産機械科1年で高大連携が行われました。
講師として日本工業大学 先進工学部 ロボティクス学科 中里 裕一 教授にお越しいただき「次世代ロボット」をテーマに3時間の講義を行っていただきました。
前半ではロボットの定義や活用事例などについて身の回りのロボットを例に講義していただきました。講義の中では実際に教育用などで活躍しているロボットの実演も行っていただき、生徒は興味深々の様子でした。

ロボットについての講義の様子
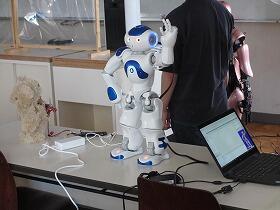
教育用ロボットの実演の様子①

教育用ロボットの実演の様子②
後半ではセグウェイの実演と試乗会が行われ、初めて乗る生徒も乗りこなしていました。感染症対策のため試乗前には手指の消毒を行い、ヘルメットは帽子の上から被るなどの対策をしての試乗会となりました。

セグウェイ試乗会の様子
今回の講義を受け、生徒たちの中で将来の夢や、今後の授業・実習に対する姿勢に変化があることを期待します。
生産機械科2年 制御実習 6週目
生産機械科2年 実習紹介!!
本日は生産機械科2年が実習を行いました。今回は「制御実習」の6週目の様子についてご紹介いたします。
今回は「動作ランプ点灯」と「スタート条件」について学習しました。
動作ランプ点灯
周囲に動作の状況を伝えるためにランプを点灯させます。
今回はボタンを押してから停止するまでランプを点灯させ、
コンベアが動作中はランプを点滅させました。
また、点滅させる回路をフリッカ回路といいます。
スタート条件とは所定の位置にパレット(荷物)がないと動作しない回路です。
「コンベアの右端にパレットがあるときにのみ、動作をさせる」ことによって間違った位置からのスタートを防ぎます。

動作ランプ、スタート条件を組み込んだ動作
さて、次回は9月24日(金)に生産機械科1年の工業技術基礎をご紹介いたします。
本日は生産機械科2年が実習を行いました。今回は「制御実習」の6週目の様子についてご紹介いたします。
今回は「動作ランプ点灯」と「スタート条件」について学習しました。
動作ランプ点灯
周囲に動作の状況を伝えるためにランプを点灯させます。
今回はボタンを押してから停止するまでランプを点灯させ、
コンベアが動作中はランプを点滅させました。
また、点滅させる回路をフリッカ回路といいます。
スタート条件とは所定の位置にパレット(荷物)がないと動作しない回路です。
「コンベアの右端にパレットがあるときにのみ、動作をさせる」ことによって間違った位置からのスタートを防ぎます。
動作ランプ、スタート条件を組み込んだ動作
さて、次回は9月24日(金)に生産機械科1年の工業技術基礎をご紹介いたします。
hyper-QUに関する研修会
hyper-QUに関する研修会
9月14日(火)、本校視聴覚室にて職員対象に「hyper-QUに関する研修会」を実施いたしました。今年度は、総合教育センターより教育相談部指導主事の先生を講師として迎え、リモート形式での開催となりました。
講話では、1学期に生徒たちに行ったアンケート結果から分かることや各々のクラスの傾向、よりよいクラスとしていくためのアドバイス等、貴重な話を伺い大変有意義な時間となりました。生徒たちと共に、よりよいクラス、よりよい学校にしていく糧とできたらと思います。

生産機械科1年 「制御・マイコン実習」 3週目
生産機械科工業技術基礎紹介
本日は生産機械科1年生で工業技術基礎が行われました。今回は「制御・マイコン実習」3週目の様子をご紹介します。
「制御・マイコン実習」では物作りに必要不可欠な機械の制御について学んでいきます。3週目となる今回は前回学んだ電磁リレーを複数使用して自己保持回路などを学びました。
まず初めに電磁リレーを1つ使用した簡単な自己保持回路を作っていきます。自己保持回路とは「ボタンを押すとランプが点灯しっぱなしになる」ような電磁リレーが自らの回路を保持しようとする回路のことを指します。
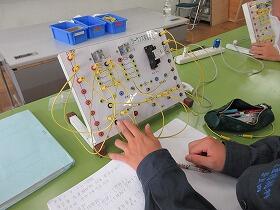
電磁リレーを1つ使用した回路
電磁リレー1つは比較的簡単でしたが、続いて2つ使用して回路を組んでいきます。ここまでくると配線の本数も倍以上になりより複雑化していきます。生徒も一生懸命に思考している様子を見ることが出来ました。
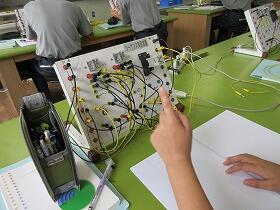
電磁リレーを2つ使用した回路
今回使用したシーケンス実習装置はタイマー回路も組めるようになっており様々な回路を自分の手で組むことが出来ます。生徒は今後より難しい制御実習へとステップアップしていきます。
次回投稿は9/21(火)に生産機械科2年生の実習を紹介いたします。
本日は生産機械科1年生で工業技術基礎が行われました。今回は「制御・マイコン実習」3週目の様子をご紹介します。
「制御・マイコン実習」では物作りに必要不可欠な機械の制御について学んでいきます。3週目となる今回は前回学んだ電磁リレーを複数使用して自己保持回路などを学びました。
まず初めに電磁リレーを1つ使用した簡単な自己保持回路を作っていきます。自己保持回路とは「ボタンを押すとランプが点灯しっぱなしになる」ような電磁リレーが自らの回路を保持しようとする回路のことを指します。
電磁リレーを1つ使用した回路
電磁リレー1つは比較的簡単でしたが、続いて2つ使用して回路を組んでいきます。ここまでくると配線の本数も倍以上になりより複雑化していきます。生徒も一生懸命に思考している様子を見ることが出来ました。
電磁リレーを2つ使用した回路
今回使用したシーケンス実習装置はタイマー回路も組めるようになっており様々な回路を自分の手で組むことが出来ます。生徒は今後より難しい制御実習へとステップアップしていきます。
次回投稿は9/21(火)に生産機械科2年生の実習を紹介いたします。
生産機械科2年 制御実習 5週目
生産機械科2年生 実習紹介!!
本日は生産機械科2年生が実習を行いました。今回は「制御実習」の5週目についてご紹介いたします。
今回の内容は先週行った「工程回路」のさらに詳しい解説と「保安回路(非常停止回路)」について学習しました。
まずは先週の最後に行った
「ボタンを押すとコンベアが左行し、左端に達すると右行し、右端で止まる。」
回路を復習しました。
その後、
コンベアの動作中に表示灯を点灯させる回路を考えました。
更に今回は以下の4工程の回路を組みました。
①ボタン(PB1)を押すとコンベアが左行する。
②パレット(鉄の荷物)が左端に達すると1度停止。
③2秒後にコンベアが右行する。
④パレットが右端に達すると自動停止。
継続して順番に動作している最中に万が一、人や機械に危険が及ぶ状況になった場合に、即時に動作を停止させる「保安回路(非常停止回路)」と呼ばれる回路があります。後半はこの「保安回路」について学習し、上記の4工程に非常停止回路を追加しました。
今回は赤いボタン(PB5)を押すと「非常停止回路」が働き動作を止めます。
右の白いボタン(PB4)を押すまでは、動作ボタン(PB1)を押しても動作できません。
「非常停止回路」が動作中はランプ(PL2)が点灯します。

非常停止回路を組み込んだ動作
さて、次回は9月17日(金)に生産機械科1年生の工業技術基礎についてご紹介いたします。
本日は生産機械科2年生が実習を行いました。今回は「制御実習」の5週目についてご紹介いたします。
今回の内容は先週行った「工程回路」のさらに詳しい解説と「保安回路(非常停止回路)」について学習しました。
まずは先週の最後に行った
「ボタンを押すとコンベアが左行し、左端に達すると右行し、右端で止まる。」
回路を復習しました。
その後、
コンベアの動作中に表示灯を点灯させる回路を考えました。
更に今回は以下の4工程の回路を組みました。
①ボタン(PB1)を押すとコンベアが左行する。
②パレット(鉄の荷物)が左端に達すると1度停止。
③2秒後にコンベアが右行する。
④パレットが右端に達すると自動停止。
継続して順番に動作している最中に万が一、人や機械に危険が及ぶ状況になった場合に、即時に動作を停止させる「保安回路(非常停止回路)」と呼ばれる回路があります。後半はこの「保安回路」について学習し、上記の4工程に非常停止回路を追加しました。
今回は赤いボタン(PB5)を押すと「非常停止回路」が働き動作を止めます。
右の白いボタン(PB4)を押すまでは、動作ボタン(PB1)を押しても動作できません。
「非常停止回路」が動作中はランプ(PL2)が点灯します。
非常停止回路を組み込んだ動作
さて、次回は9月17日(金)に生産機械科1年生の工業技術基礎についてご紹介いたします。
生産機械科1年 「制御・マイコン実習」 2週目
生産機械科工業技術基礎紹介
本日は生産機械科1年生で工業技術基礎が行われました。今回は「制御・マイコン実習」2週目の様子をご紹介します。
「制御・マイコン実習」では物作りに必要不可欠な機械の制御について学んでいきます。2週目となる今回もシーケンス実習装置を使用して回路を作っていきますが、今回は電磁リレーという新しい部品の仕組みとリレー回路について学んでいきます。電磁リレーとは電磁石の原理を利用したリレーのことで、電流を流すと複数の回路を同時に操作することが可能となります。

電磁リレーを説明する様子
生徒が自分で回路を考える様子
1週目とは異なり、実習装置に取り付けられた電磁リレーを用いるため、回路がより難しくなります。自分の作った回路が上手く動作したときは生徒も喜んでいました。
作った回路を確認する様子
次回投稿は9/14(火)に生産機械科2年生の実習を紹介いたします。
機械系 面接指導
機械系3年生 就職面接指導
機械系3年生の就職希望者を対象に、宇都宮ワークエントリーの方を講師に招き、面接指導を実施しました(9/8生産機械科、9/9機械科)。

全体指導

個人面接
就職試験開始を1週間後に控え、本番モード突入です。
機械系3年生の就職希望者を対象に、宇都宮ワークエントリーの方を講師に招き、面接指導を実施しました(9/8生産機械科、9/9機械科)。
全体指導
個人面接
就職試験開始を1週間後に控え、本番モード突入です。
生産機械科2年 「制御実習」 4週目
生産機械科実習紹介!!
本日は生産機械科2年生において実習が行われました。
今回は「制御実習」の4週目についてご紹介いたします。
制御実習の3週目までにPLCや制御実習装置の概要と、プログラミングコンソールの操作方法について学習しました。
今回からは、ランプの点灯に加え、コンベアの往復(工程回路)について学習します。
コンベアの動作もランプと同じ「出力機器」になりますので、作業は前回と同じです。
まずは復習として「ボタンを押すとランプが点灯する」という動作から始めました。
次に、ランプをコンベア動作に置き換えて以下のようなプログラムを作成し、コンベアの動作を確認します。
①ボタンを押すとコンベアが左行する。
②ボタンを押すとコンベアが左行し続け、左端で止まる。
③ボタンを押すとコンベアが左行し、左端に達すると右行し、右端で止まる。

コンベア動作③の確認
②のプログラムを作成する過程において、一度の入力信号で動作を継続して行う「自己保持回路」について学びました。
また、③は動作を順番に行う回路で「工程回路」と呼ばれており、次回はこの工程回路を応用してさらに複雑な制御を行います。
次回は9月10日(金)に生産機械科1年生の工業技術基礎についてご紹介いたします。
本日は生産機械科2年生において実習が行われました。
今回は「制御実習」の4週目についてご紹介いたします。
制御実習の3週目までにPLCや制御実習装置の概要と、プログラミングコンソールの操作方法について学習しました。
今回からは、ランプの点灯に加え、コンベアの往復(工程回路)について学習します。
コンベアの動作もランプと同じ「出力機器」になりますので、作業は前回と同じです。
まずは復習として「ボタンを押すとランプが点灯する」という動作から始めました。
次に、ランプをコンベア動作に置き換えて以下のようなプログラムを作成し、コンベアの動作を確認します。
①ボタンを押すとコンベアが左行する。
②ボタンを押すとコンベアが左行し続け、左端で止まる。
③ボタンを押すとコンベアが左行し、左端に達すると右行し、右端で止まる。
コンベア動作③の確認
②のプログラムを作成する過程において、一度の入力信号で動作を継続して行う「自己保持回路」について学びました。
また、③は動作を順番に行う回路で「工程回路」と呼ばれており、次回はこの工程回路を応用してさらに複雑な制御を行います。
次回は9月10日(金)に生産機械科1年生の工業技術基礎についてご紹介いたします。
高円宮杯日本武道館書写書道大展覧会
投稿日時 : 2021/09/07
 文芸部
文芸部
文芸部書道部門の活動について、ご報告いたします。
第37回高円宮杯日本武道館書写書道大展覧会に出品しました。

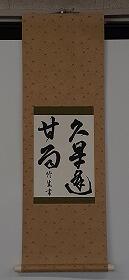
左側:「ひらきたる 薄紅梅の 空に觸れ」(深見けん二の句)
右側:「久旱逢甘雨」(中国の言葉で、長い間待ち望んだことがかなえられて喜ぶたとえ)
左側が大会奨励賞、右側が特選をいただきました。
今後も頑張りましょう!
第2学期始業式・表彰式が行われました
投稿日時 : 2021/09/03
 教務部
教務部
9月1日(水)第2学期始業式・表彰式がリモート形式で実施されました。
表彰式では、新体力テストの優秀者や、夏休みに活躍したものづくりコンテストやロボットコンテストの表彰がされました。
2学期は、現在緊急事態宣言下ということで「時差登校・短縮授業」で行われ、部活動も制限されています。感染症対策を十分に取りつつ、充実した学校生活を送りましょう。


表彰式では、新体力テストの優秀者や、夏休みに活躍したものづくりコンテストやロボットコンテストの表彰がされました。
2学期は、現在緊急事態宣言下ということで「時差登校・短縮授業」で行われ、部活動も制限されています。感染症対策を十分に取りつつ、充実した学校生活を送りましょう。
生産機械科1年 「制御・マイコン実習」 1週目
生産機械科工業技術基礎紹介
本日は生産機械科1年生で工業技術基礎が行われました。今回は「制御・マイコン実習」1週目の様子をご紹介します。
「制御・マイコン実習」では物作りに必要不可欠な機械の制御について学んでいきます。現在身の回りのあらゆるものはコンピュータなどにより高度に自動化されています。前半ではシーケンス実習装置を使用して簡単な回路の作成から応用したものまでを学習します。

実習の様子
シーケンス実習装置(写真中央)
1週目となる今回はシーケンス実習装置の基本的な取扱と、制御の種類について学びました。回路が複雑になるにつれて生徒は自ら考えながら配線していく様子を見ることが出来ました。ここからミニマイコンカーのプログラミングや3年生ではロボットアームの制御に発展していきます。
回路を作成する様子
次回投稿は9/7(火)に生産機械科2年生の実習を紹介いたします。


真心工房のご案内

お知らせ
学校案内パンフレット完成しました。こちらをご覧ください。
(女子向けパンフ監修:宇都宮メディア・アーツ専門学校ビジュアルデザイン科)
女子生徒向け↓
一般向け↓

真工高の四季