
文字
背景
行間


真岡工業高校NEWS
生産機械科1年 「溶接実習」 4週目
生産機械科工業技術基礎紹介
本日は生産機械科1年生で工業技術基礎が行われました。今回は「溶接実習」4週目の様子をご紹介します。
1年生の「溶接実習」では一人一個ペン立てを作成するために鉄板を削り、溶接を行っていきます。4週目となる今回はガス溶接の復習を行った後、簡単な練習を行い、3週目で作成した部品の溶接を行っていきます。
3週目の実習から時間があいているため、まずはガス溶接機の取扱と炎の作り方を復習していきます。

炎の作り方を復習する様子
次に実際に鉄板に炎を当て、溶接の練習をおこなっていきます。

溶接の練習をする様子

練習で作成した部品(2枚の板を直角に溶接)
練習が終わると、3週目で作成した部品を使用して実際に溶接で組み立てていきます。このとき溶接の熱で材料が溶け落ちたり、曲がったりしないように注意して作業を進めました。

部品を溶接で組み立てる様子

組みあがったペン立て(正面から見た様子)

組みあがったペン立て(上から見た様子)
次回はこのペン立てに底板を溶接で組付けていきます。
次回投稿は11/26に生産機械科1年生の実習の様子をご紹介いたします。
本日は生産機械科1年生で工業技術基礎が行われました。今回は「溶接実習」4週目の様子をご紹介します。
1年生の「溶接実習」では一人一個ペン立てを作成するために鉄板を削り、溶接を行っていきます。4週目となる今回はガス溶接の復習を行った後、簡単な練習を行い、3週目で作成した部品の溶接を行っていきます。
3週目の実習から時間があいているため、まずはガス溶接機の取扱と炎の作り方を復習していきます。
炎の作り方を復習する様子
次に実際に鉄板に炎を当て、溶接の練習をおこなっていきます。
溶接の練習をする様子
練習で作成した部品(2枚の板を直角に溶接)
練習が終わると、3週目で作成した部品を使用して実際に溶接で組み立てていきます。このとき溶接の熱で材料が溶け落ちたり、曲がったりしないように注意して作業を進めました。
部品を溶接で組み立てる様子
組みあがったペン立て(正面から見た様子)
組みあがったペン立て(上から見た様子)
次回はこのペン立てに底板を溶接で組付けていきます。
次回投稿は11/26に生産機械科1年生の実習の様子をご紹介いたします。
真岡中学校「マイ・チャレンジ体験学習」受け入れ
投稿日時 : 2021/11/18
 教務部
教務部
真岡中学校「マイ・チャレンジ体験学習」受け入れ
11月16日(火)から11月18日(木)の3日間、真岡中学校の「マイ・チャレンジ体験学習」として、中学2年生2名が本校に来校しました。
学校公仕業務の体験ということで、落ち葉の清掃や剪定枝の片付け、給油や蛍光灯の交換の補助などの環境整備活動に取り組んでもらいました。
最終日の午後には、本校の機械科・生産機械科・建設科・電子科の各科の見学も実施しました。
参加した中学生からは、「大変だったけれども、とてもやりがいのある仕事だった」、「働くことの大変さがよく分かった」などの感想が寄せられました。
この体験学習が、今後の自己の在り方や生き方を見つめるための一助となれば幸いです。
3日間、お疲れ様でした。

生産機械科2年 溶接実習 4週目
生産機械科2年 実習紹介!
本日は生産機械科2年で実習が行われました。今回は「溶接実習」の4週目についてご紹介いたします。
今回は、ガス溶接による鉄板の接合を行いました。
鉄板を二枚縦に並べる「突き合わせ」という溶接を行いました。
今回溶接したものは7週目の実習で「引張試験」を行い強度を測定します。
うまく溶接できてないと強度がでません。

ガス溶接の様子
次回は11月19日(金)に生産機械科1年の工業技術基礎をご紹介いたします。
本日は生産機械科2年で実習が行われました。今回は「溶接実習」の4週目についてご紹介いたします。
今回は、ガス溶接による鉄板の接合を行いました。
鉄板を二枚縦に並べる「突き合わせ」という溶接を行いました。
今回溶接したものは7週目の実習で「引張試験」を行い強度を測定します。
うまく溶接できてないと強度がでません。
ガス溶接の様子
次回は11月19日(金)に生産機械科1年の工業技術基礎をご紹介いたします。
生産機械科1年 「電気実習」 6週目
生産機械科工業技術基礎紹介
本日は生産機械科1年生で工業技術基礎が行われました。今回は「電気実習」6週目の様子をご紹介します。
「電気実習」の後半では一人一台ミニマイコンカーを製作していきます。6週目となる今回はミニマイコンカーを完成させてプログラム学習を行っていきます。
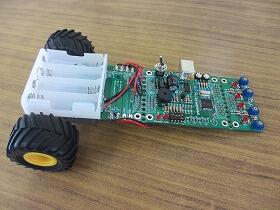
最終的に出来上がるミニマイコンカー
まずは前回作成した基盤に、光に反応するセンサー等を取り付けていきます。ミニマイコンカーはこのセンサーで路面の反射光を読み取り、ライントレース(白線に沿って走行)することができます。繊細な部品なので慎重にハンダ付けを行っていきます。
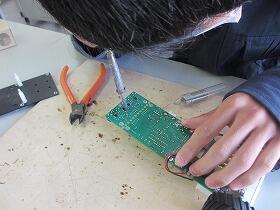
基板にセンサー等をハンダ付けする様子
続いて、電池ボックスとギヤボックス、モータ、タイヤを取り付け、ミニマイコンカーを完成させていきます。この段階までくるとミニマイコンカーの形が見えてくるため、生徒は夢中になって組み立てていきます。

部品を取り付ける様子
ミニマイコンカーが完成しました。ここで正常にプログラムを書き込みができるかの確認も含めてプログラム学習を行っていきます。このミニマイコンカーはケーブルを使用してパソコンと接続することによりプログラムを書き込むことができます。

本日完成したミニマイコンカー
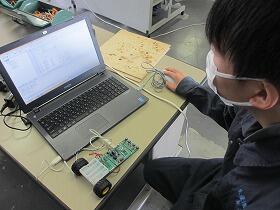
パソコンと接続してプログラムを確認する様子
次回はこのミニマイコンカーを使用した、制御マイコン実習に入っていきます。実際に自分でプログラミングを行いながらコースを走らせる実習となります。
次回投稿は11/16に生産機械科2年生の実習の様子をご紹介いたします。
本日は生産機械科1年生で工業技術基礎が行われました。今回は「電気実習」6週目の様子をご紹介します。
「電気実習」の後半では一人一台ミニマイコンカーを製作していきます。6週目となる今回はミニマイコンカーを完成させてプログラム学習を行っていきます。
最終的に出来上がるミニマイコンカー
まずは前回作成した基盤に、光に反応するセンサー等を取り付けていきます。ミニマイコンカーはこのセンサーで路面の反射光を読み取り、ライントレース(白線に沿って走行)することができます。繊細な部品なので慎重にハンダ付けを行っていきます。
基板にセンサー等をハンダ付けする様子
続いて、電池ボックスとギヤボックス、モータ、タイヤを取り付け、ミニマイコンカーを完成させていきます。この段階までくるとミニマイコンカーの形が見えてくるため、生徒は夢中になって組み立てていきます。
部品を取り付ける様子
ミニマイコンカーが完成しました。ここで正常にプログラムを書き込みができるかの確認も含めてプログラム学習を行っていきます。このミニマイコンカーはケーブルを使用してパソコンと接続することによりプログラムを書き込むことができます。
本日完成したミニマイコンカー
パソコンと接続してプログラムを確認する様子
次回はこのミニマイコンカーを使用した、制御マイコン実習に入っていきます。実際に自分でプログラミングを行いながらコースを走らせる実習となります。
次回投稿は11/16に生産機械科2年生の実習の様子をご紹介いたします。
生産機械科2年 機械仕上実習 7週目
生産機械科2年 実習紹介!!
本日は生産機械科2年で実習が行われました。今回は「機械仕上実習」の7週目についてご紹介いたします。
6・7週目の実習では旋盤で独楽(こま)を製作します。
持ち手の部分の「外径切削」や地面と接触する尖った部分「テーパー加工」を学習します。
「テーパー加工」は刃物をセットしている台をナナメにすることで、製作物を円錐状に削ります。
実習の最後には製作した独楽がどれだけ長く回せるか、誰の独楽が強いのか対戦をしました。


旋盤加工状況 テーパー加工


独楽の対戦 製作した独楽
次回は11月12日(金)に生産機械科1年の工業技術基礎をご紹介いたします。
本日は生産機械科2年で実習が行われました。今回は「機械仕上実習」の7週目についてご紹介いたします。
6・7週目の実習では旋盤で独楽(こま)を製作します。
持ち手の部分の「外径切削」や地面と接触する尖った部分「テーパー加工」を学習します。
「テーパー加工」は刃物をセットしている台をナナメにすることで、製作物を円錐状に削ります。
実習の最後には製作した独楽がどれだけ長く回せるか、誰の独楽が強いのか対戦をしました。
旋盤加工状況 テーパー加工
独楽の対戦 製作した独楽
次回は11月12日(金)に生産機械科1年の工業技術基礎をご紹介いたします。


真心工房のご案内

お知らせ
学校案内パンフレット完成しました。こちらをご覧ください。
(女子向けパンフ監修:宇都宮メディア・アーツ専門学校ビジュアルデザイン科)
女子生徒向け↓
一般向け↓

真工高の四季