
文字
背景
行間


真岡工業高校NEWS
第1学期終業式を迎えました。
本日8月5日、本校の第1学期終業式が行われました。
新型コロナウイルス感染防止のための休業期間があり、授業時間確保のために夏休みが短縮になりました。また新型コロナウイルス感染防止・熱中症防止のため、終業式の校長式辞等は校内放送で行われ、生徒は各ホームルーム教室で終業式に参加する形式となりました。その後、学習指導部長、進路指導部長、生徒指導部長からの諸注意を頂きました。
夏休みが短縮された中で、やるべきことを取捨選択し、新型コロナウイルス感染のほか、交通事故、水難事故などに遭わずに有意義な夏休みとするように過ごしてほしいと思います。


新型コロナウイルス感染防止のための休業期間があり、授業時間確保のために夏休みが短縮になりました。また新型コロナウイルス感染防止・熱中症防止のため、終業式の校長式辞等は校内放送で行われ、生徒は各ホームルーム教室で終業式に参加する形式となりました。その後、学習指導部長、進路指導部長、生徒指導部長からの諸注意を頂きました。
夏休みが短縮された中で、やるべきことを取捨選択し、新型コロナウイルス感染のほか、交通事故、水難事故などに遭わずに有意義な夏休みとするように過ごしてほしいと思います。
生産機械科2年 「制御実習」 3週目
生産機械科実習紹介
本日8/4(火)は生産機械科2年生で実習が行われました。今回は前回の続きとして「制御実習」を紹介します。
今回はサイクル動作(工程回路)について学習しました。
サイクル動作とは入力された信号を内部補助リレーに置き換えてから出力することによって複数の出力機器を順番に出力させる回路です。

サイクル動作(行程回路)の説明
今回の実習では、上図のように「ボタンを押すとランプ1が点灯し、2秒後にランプ2が点灯、さらに2秒後にすべて消灯する」という内容の制御を行いました。
前回学習した「タイマ回路」「自己保持回路」を応用したもので、ボタン押下の信号を自己保持し、2つのタイマを用いて点灯、消灯を行うものです。
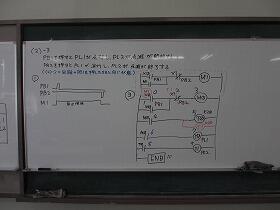
フリッカ回路(ランプの点滅)の説明
さらにこの制御を応用して、上図のように自動でランプを点滅させることができます。この回路をフリッカ回路といいます。3年生の自動制御実習では「サイクル動作」「タイマ回路」「フリッカ回路」等を応用してコンベアの動作を制御します。

ランプ点灯の様子
次回は9/4(金)に生産機械科1年生の工業技術基礎について紹介します。
本日8/4(火)は生産機械科2年生で実習が行われました。今回は前回の続きとして「制御実習」を紹介します。
今回はサイクル動作(工程回路)について学習しました。
サイクル動作とは入力された信号を内部補助リレーに置き換えてから出力することによって複数の出力機器を順番に出力させる回路です。
サイクル動作(行程回路)の説明
今回の実習では、上図のように「ボタンを押すとランプ1が点灯し、2秒後にランプ2が点灯、さらに2秒後にすべて消灯する」という内容の制御を行いました。
前回学習した「タイマ回路」「自己保持回路」を応用したもので、ボタン押下の信号を自己保持し、2つのタイマを用いて点灯、消灯を行うものです。
フリッカ回路(ランプの点滅)の説明
さらにこの制御を応用して、上図のように自動でランプを点滅させることができます。この回路をフリッカ回路といいます。3年生の自動制御実習では「サイクル動作」「タイマ回路」「フリッカ回路」等を応用してコンベアの動作を制御します。
ランプ点灯の様子
次回は9/4(金)に生産機械科1年生の工業技術基礎について紹介します。
生産機械科3年「自動制御実習」 4週目
投稿日時 : 2020/08/03
 生産機械科
生産機械科
生産機械科実習紹介
本日8/3(月)は生産機械科3年生で実習が行われました。今回は前回の続きとして「自動制御実習」を紹介します。
今週は「PLCを用いたシーケンス制御」と「ロボットアームの制御」について学習しましたが、今回の記事では「ロボットアーム実習」について取り上げたいと思います。

ロボットアームの制御の様子
生産機械科では、EPSON製のロボットアームを使用し、「PTP制御」によってワーク(材料)の移動を行います。
PTP制御(Point To Point 制御)とはロボットアームの目標地点をポイントとしてティーチ(ロボットアームに記憶させること)させ、ロボットアームを動かす制御方法です。

PCで関節の状態を確認する様子
今回は「台からコンベアへ、ワークを移動させる」という内容の制御を行いました。ポイント1~4までの4つの位置をロボットアームにティーチし、プログラムを実行します。

各関節の動きを確認している様子
ロボットアームの各関節の動きについて班員と一緒に相談し、考えることで全員が台からコンベアまでワークを移動させることができました。
ロボットには難しいイメージもあるかと思いますが、企業の努力によって扱い方が容易なものもたくさん商品化されています。教育現場で産業の自動化(ロボット)を学習することで、ロボットを扱う世代の生徒達には今後の糧となると思います。
次回は明日8/4(火)に生産機械科2年生の実習について紹介します。
本日8/3(月)は生産機械科3年生で実習が行われました。今回は前回の続きとして「自動制御実習」を紹介します。
今週は「PLCを用いたシーケンス制御」と「ロボットアームの制御」について学習しましたが、今回の記事では「ロボットアーム実習」について取り上げたいと思います。
ロボットアームの制御の様子
生産機械科では、EPSON製のロボットアームを使用し、「PTP制御」によってワーク(材料)の移動を行います。
PTP制御(Point To Point 制御)とはロボットアームの目標地点をポイントとしてティーチ(ロボットアームに記憶させること)させ、ロボットアームを動かす制御方法です。
PCで関節の状態を確認する様子
今回は「台からコンベアへ、ワークを移動させる」という内容の制御を行いました。ポイント1~4までの4つの位置をロボットアームにティーチし、プログラムを実行します。
各関節の動きを確認している様子
ロボットアームの各関節の動きについて班員と一緒に相談し、考えることで全員が台からコンベアまでワークを移動させることができました。
ロボットには難しいイメージもあるかと思いますが、企業の努力によって扱い方が容易なものもたくさん商品化されています。教育現場で産業の自動化(ロボット)を学習することで、ロボットを扱う世代の生徒達には今後の糧となると思います。
次回は明日8/4(火)に生産機械科2年生の実習について紹介します。
飛沫防止パーテーションの寄贈(中村中、真岡東小、田野中、真岡小)
飛沫防止のパーテーションを寄贈してきました!
建設科の生徒が、各学校から要望に応じたサイズの飛沫防止パーテーションを製作し、小学校や中学校に飛沫防止パーテーションを寄贈してきました。各学校の校長先生をはじめ、多くの先生方に喜ばれ、生徒達も嬉しそうでした。
7月22日 中村中学校 5個 建設科1年 糸賀さん
7月27日 真岡東小学校 3個 建設科3年 吉澤君、同科2年 武田君
田野中学校 7個 建設科3年 峰岸君、同科1年 竹野井君
7月29日 真岡小学校 24個 建設科3年 奥野君、川城君、藤田君、峰岸君

寄贈の様子 中村中学校

寄贈の様子 真岡東小学校

寄贈の様子 田野中学校

寄贈の様子 真岡小学校
建設科の生徒が、各学校から要望に応じたサイズの飛沫防止パーテーションを製作し、小学校や中学校に飛沫防止パーテーションを寄贈してきました。各学校の校長先生をはじめ、多くの先生方に喜ばれ、生徒達も嬉しそうでした。
7月22日 中村中学校 5個 建設科1年 糸賀さん
7月27日 真岡東小学校 3個 建設科3年 吉澤君、同科2年 武田君
田野中学校 7個 建設科3年 峰岸君、同科1年 竹野井君
7月29日 真岡小学校 24個 建設科3年 奥野君、川城君、藤田君、峰岸君
寄贈の様子 中村中学校
寄贈の様子 真岡東小学校
寄贈の様子 田野中学校
寄贈の様子 真岡小学校
生産機械科1年「板金・溶接作業」2週目
生産機械科工業技術基礎紹介
本日7/31(金)は生産機械科1年生で工業技術基礎が行われました。今回は「板金・溶接作業」実習の2週目の様子をご紹介します。
前回はペン立てを作るため材料(鉄板)に罫書きを行い、帯ノコ盤を用いて切断を行い・ボール盤を用いてイニシャルの孔開けまでを行いました。2週目となる今回は、粗加工した部品のヤスリ仕上げとイニシャルの仕上げを行っていきます。切断した直後の部品は図面よりも大きく、バリも残っており非常に危険なため金ヤスリを用いて削っていきます。

前回製作した部品

金ヤスリで角を削る様子
部品の角が丸く仕上がったところで、ノミと金槌を使い前回孔開けした部分を加工(孔と孔のつなぎ目を切断)していきます。万力に部品を固定し、ノミの角度を試行錯誤しながら上手に加工する様子を見ることができました。最終的にイニシャルの内側をヤスリで綺麗に仕上げて部品が完成となります。

ノミで孔と孔のつなぎ目を切断する様子

イニシャルの内側を仕上げる様子

完成した部品
完成した部品はバリがなく滑らかな形状をしています。曲線が入る難しいイニシャルも頑張って削ったため綺麗に仕上がりました。
次回は8/3(月)に生産機械科3年生の実習を紹介いたします。

カウンタ
0
3
8
6
0
4
1
3
真心工房のご案内

お知らせ
学校案内パンフレット完成しました。こちらをご覧ください。
(女子向けパンフ監修:宇都宮メディア・アーツ専門学校ビジュアルデザイン科)
女子生徒向け↓
一般向け↓

真工高の四季