
文字
背景
行間

カテゴリ:生産機械科の活動
生産機械科3年 CAD実習
生産機械科3年 実習紹介!!
本日は生産機械科3年生の「実習」から「CAD実習」の2週目についてご紹介します。
2週目の今回は、Jw cadを使用して課題の作図を行いました。下図のような図形について二次元の図面を作成します。
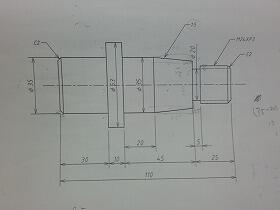
課題となる図面
作成した図面は画面上で、下図のようになりました。線の太さや、寸法について正確に作図することが重要になります。
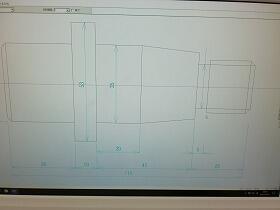
作成した図面
手書き製図、二次元の製図の基礎を理解した上で、今後は三次元の製図にも挑戦していきます。
さて、次回は5/25(火)に生産機械科2年の実習について紹介します。
本日は生産機械科3年生の「実習」から「CAD実習」の2週目についてご紹介します。
2週目の今回は、Jw cadを使用して課題の作図を行いました。下図のような図形について二次元の図面を作成します。
課題となる図面
作成した図面は画面上で、下図のようになりました。線の太さや、寸法について正確に作図することが重要になります。
作成した図面
手書き製図、二次元の製図の基礎を理解した上で、今後は三次元の製図にも挑戦していきます。
さて、次回は5/25(火)に生産機械科2年の実習について紹介します。
生産機械科2年 機械仕上実習 2週目
生産機械科2年実習紹介!!
本日は生産機械科2年において実習が行われました。
今回は「機械仕上実習」の2週目についてご紹介いたします。
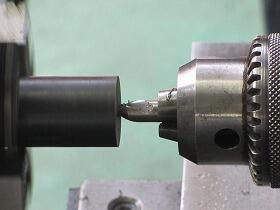
今回は、普通旋盤技能検定3級課題のテーパの部分を加工しました。
下図のように刃物台に角度を付けて切削することにより、円筒物に傾斜を持たせます。

角度を付けた刃物台
下図のような形状に加工することができました。次回はすべての段を加工し、課題を完成させます。

テーパ加工後の材料
次回は5月24日(月)に生産機械科3年の実習についてご紹介いたします。
本日は生産機械科2年において実習が行われました。
今回は「機械仕上実習」の2週目についてご紹介いたします。
今回は、普通旋盤技能検定3級課題のテーパの部分を加工しました。
下図のように刃物台に角度を付けて切削することにより、円筒物に傾斜を持たせます。
角度を付けた刃物台
下図のような形状に加工することができました。次回はすべての段を加工し、課題を完成させます。
テーパ加工後の材料
次回は5月24日(月)に生産機械科3年の実習についてご紹介いたします。
生産機械科3年 CAD実習
生産機械科3年 実習紹介!!
本日は生産機械科3年生の「実習」から「CAD実習」の1週目についてご紹介します。
CAD実習は、1年次から3年間座学で学んできた「製図」の知識を生かし、コンピュータを使用して図面を作成する実習です。CADとは、Computer Aided Design(コンピュータ 支援 設計)の頭文字C・A・Dであらわされ、多くの企業で製品の設計・開発に使用されるものです。
生産機械科3年の実習では、このCADを2種類のソフトを使用して学んでいきます。
1週目の今回は、Jw cadを使用して2次元の図面の作成を学びました。

「Jw cad」のアイコン
下図は本日学習した課題です。コマンドを使い分けながら作図を行いました。
課題となる投影図
CADを使用することで、手描きの図面との時間的な差や座学で学んだ製図の基本的ルールの大切さについて身をもって体験していました。
さて、次回は5/18(火)に生産機械科2年の実習2週目について紹介します。
本日は生産機械科3年生の「実習」から「CAD実習」の1週目についてご紹介します。
CAD実習は、1年次から3年間座学で学んできた「製図」の知識を生かし、コンピュータを使用して図面を作成する実習です。CADとは、Computer Aided Design(コンピュータ 支援 設計)の頭文字C・A・Dであらわされ、多くの企業で製品の設計・開発に使用されるものです。
生産機械科3年の実習では、このCADを2種類のソフトを使用して学んでいきます。
1週目の今回は、Jw cadを使用して2次元の図面の作成を学びました。
「Jw cad」のアイコン
下図は本日学習した課題です。コマンドを使い分けながら作図を行いました。
課題となる投影図
CADを使用することで、手描きの図面との時間的な差や座学で学んだ製図の基本的ルールの大切さについて身をもって体験していました。
さて、次回は5/18(火)に生産機械科2年の実習2週目について紹介します。
生産機械科1年 旋盤実習3週目
生産機械科工業技術基礎紹介
5 / 10(金)に生産機械科1年生で工業技術基礎が行われました。今回は「旋盤作業」3週目の様子をご紹介します。
前半最終週となる今回は各自で工具のセットを行った後、芯押し台と回転センタの使用方法を学びました。

回転センタ脱着の様子

ドリルチャックが取り付いた様子
センタドリルで支持穴を開ける様子
続いて、回転センタを使用した外周切削と面取り、自動送りを学びました。

回転センタを使用した外径切削の様子
自動送りを学んだことで仕上げ面が綺麗になり、作業も楽になりました。
今後もたくさん練習して技術を磨いてほしいと思います。
最後に、拭きあげと油さしを行って旋盤実習前半が終了となります。
次回は5/17(月)生産機械科3年生の実習をご紹介いたします。
生産機械科2年 機械仕上実習 1週目
生産機械科2年実習紹介!!
本日は生産機械科2年において実習が行われました。
今回は「機械仕上実習」の1週目についてご紹介いたします。
機械仕上実習では旋盤を使い普通旋盤技能検定3級課題のオス材を練習します。
本日はオス材片側の外周を粗加工し(大まかに削り)、段々になっている1段だけ仕上加工を行いました。
最後に段になっている角が尖っていて(バリがあり)危ないので、糸面取り(少しだけ角を削る)を行いました。

外周仕上加工の様子
次回は5月14日(金)に生産機械科1年の工業技術基礎についてご紹介いたします。
生産機械科3年 自動制御実習
生産機械科実習紹介
本日5/10(月)は生産機械科3年生で実習が行われました。今回は「自動制御実習」4週目の様子をご紹介します。
今回はロボットアームを用いて、ワーク(材料)を台からコンベア上に移動させるためのプログラムについて学習しました。
ロボットアームはPTP(Point to Point)制御を用いて制御を行います。6つの軸を動かしながら、任意の位置(Point)をいくつか設定し、順番にたどっていく制御方法です。
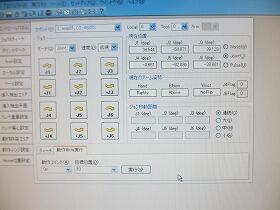
操作画面
下図が制御した時の動作です。製造ラインにおいてもこのような制御によってロボットアームを使用しています。
動作確認の様子
次回は5/11(火)生産機械科2年生の実習をご紹介いたします。
本日5/10(月)は生産機械科3年生で実習が行われました。今回は「自動制御実習」4週目の様子をご紹介します。
今回はロボットアームを用いて、ワーク(材料)を台からコンベア上に移動させるためのプログラムについて学習しました。
ロボットアームはPTP(Point to Point)制御を用いて制御を行います。6つの軸を動かしながら、任意の位置(Point)をいくつか設定し、順番にたどっていく制御方法です。
操作画面
下図が制御した時の動作です。製造ラインにおいてもこのような制御によってロボットアームを使用しています。
動作確認の様子
次回は5/11(火)生産機械科2年生の実習をご紹介いたします。
生産機械科2年 制御実習 3週目
生産機械科2年実習紹介!!
本日は生産機械科2年において実習が行われました。
今回は「制御実習」の3週目についてご紹介いたします。
前期としての実習はこれで1テーマが終了になります。
3週目の制御実習ではPLCの基本命令を組み合わせた、回路の応用についてです。
インターロック回路を学習し、タイマ回路を活用したフリッカ回路を学習しました。
インターロック回路
クイズ番組の早押しボタンのような、
1つが動作していると他のものが動作しないようにする回路です。
フリッカ回路(タイマサイクル)
タイマ命令を組合せてランプの点灯する時間と消灯する時間を設定することで
ランプを点滅させることができる回路です。
フリッカ回路(タイマサイクル)の動作
次回は4月30日(金)に生産機械科1年の工業技術基礎についてご紹介いたします。

生産機械科3年 自動制御実習
生産機械科実習紹介
本日4/26(月)は生産機械科3年生で実習が行われました。今回は「自動制御実習」3週目の様子をご紹介します。
今回は、前回実習で行ったサイクル動作(工程回路)という「決められた順序で動作を行うための回路」の復習から入りました。
その後、
「非常停止」非常停止ボタンが押されたら作動が停止する回路
「スタート条件(AND回路)」:決まった位置でリミットスイッチが押されていないとスタートボタンを押しても作動しない回路
「動作中のランプ点灯」:そのままの意味で、回路が動作している間は表示ランプが点灯している回路
以上3つを新たに勉強し、先週の復習で作成したラダープログラムに順に追加していきました。

非常停止と動作ランプの確認
次回は4/27(火)生産機械科2年生の実習をご紹介いたします。
本日4/26(月)は生産機械科3年生で実習が行われました。今回は「自動制御実習」3週目の様子をご紹介します。
今回は、前回実習で行ったサイクル動作(工程回路)という「決められた順序で動作を行うための回路」の復習から入りました。
その後、
「非常停止」非常停止ボタンが押されたら作動が停止する回路
「スタート条件(AND回路)」:決まった位置でリミットスイッチが押されていないとスタートボタンを押しても作動しない回路
「動作中のランプ点灯」:そのままの意味で、回路が動作している間は表示ランプが点灯している回路
以上3つを新たに勉強し、先週の復習で作成したラダープログラムに順に追加していきました。
非常停止と動作ランプの確認
次回は4/27(火)生産機械科2年生の実習をご紹介いたします。
生産機械科1年 ものづくりマイスター測定技術講習
生産機械科1年 測定技術講習
本日は工業技術基礎の時間を使用して、県技能振興センターのものづくりマイスターを講師に招き、ノギス・マイクロメーターの測定法や取り扱い方を丁寧に教えていただきました。
1限目 講話「測定に関する基礎知識」
2限目 実技「ノギスの構造と使用方法、測定実習」
3限目 実技「マイクロメータの構造と使用方法、測定実習」

1限目の講話の様子

ノギス測定実習の様子

マイクロメータ測定実習の様子

マイクロメータ説明の様子
測定はもの作りの基礎であり、測定が正確に素早く行われないと良いもの作りができないということを教わりました。生徒はもの作りのスタートラインに立ちました。これから3年間の実習を通してもの作りの楽しさ・難しさを学んでいきます。
生産機械科3年 自動制御実習
生産機械科3年 実習紹介!!
本日は生産機械科3年において実習が行われました。今回は「自動制御実習」の2週目についてご紹介いたします。
実習の前半では前回までに学習した、PLCによる制御実習装置の制御について復習を行いました。後半にかけては、今回のメインとなるアクチュエータ(コンベア)の動作について学習しました。制御内容は以下の通りです。
①ボタンを押すと、コンベアが右から左へ動作する
②左端で2秒間停止する
③コンベアが左から右へ移動する
④右端で停止する
コンベアの動作
次回は4月20日(火)に生産機械科2年の実習についてご紹介いたします。
本日は生産機械科3年において実習が行われました。今回は「自動制御実習」の2週目についてご紹介いたします。
実習の前半では前回までに学習した、PLCによる制御実習装置の制御について復習を行いました。後半にかけては、今回のメインとなるアクチュエータ(コンベア)の動作について学習しました。制御内容は以下の通りです。
①ボタンを押すと、コンベアが右から左へ動作する
②左端で2秒間停止する
③コンベアが左から右へ移動する
④右端で停止する
コンベアの動作
次回は4月20日(火)に生産機械科2年の実習についてご紹介いたします。

カウンタ
2
7
7
2
3
0
0
電気・電子研究委員会より (関電研)
令和 6 年度の電気電子研究委員会に
おいて、今年度も真岡工業高校が事
務局となります。
よろしくお願いいたします。
真心工房のご案内

お知らせ
学校案内パンフレット完成しました。こちらをご覧ください。
(女子向けパンフ監修:宇都宮メディア・アーツ専門学校ビジュアルデザイン科)
女子生徒向け↓
一般向け↓

真工高の四季