
文字
背景
行間


真岡工業高校NEWS
生産機械科2年 機械仕上実習 4週目
生産機械科2年 実習紹介!!
本日は生産機械科2年で実習が行われました。今回は「機械仕上実習」の4週目についてご紹介いたします。
機械仕上実習の後半では、下図のような豆ジャッキを製作し、旋盤加工における重要な要素である「ねじ切り加工」「テーパ加工」「突っ切り」などについて学習します。

豆ジャッキ
今回はジャッキの土台となる部品の穴あけ加工をメインで行いました。まずは、寸法通りになる丸棒の外形を加工しました。

外形切削
次にセンタドリルと呼ばれる径の小さいドリルで、ドリルの貫通穴をあけるための下穴をあけていきます。
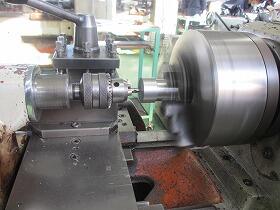
センタドリルによる加工
貫通穴は6mmと12mmの2回に分けて、穴あけを行いました。
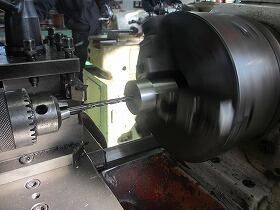
6mmの穴あけ

12mmの穴あけ
最後に20mmと25mmのドリルで決まった深さに加工して、材料の内側に段差をつけました。

ドリルで段差をつける様子
次回は12/15(水)に生産機械科2年の機械仕上実習において、今回加工したドリル穴にめねじを切り、土台部分が完成する様子をご紹介いたします。
本日は生産機械科2年で実習が行われました。今回は「機械仕上実習」の4週目についてご紹介いたします。
機械仕上実習の後半では、下図のような豆ジャッキを製作し、旋盤加工における重要な要素である「ねじ切り加工」「テーパ加工」「突っ切り」などについて学習します。
豆ジャッキ
今回はジャッキの土台となる部品の穴あけ加工をメインで行いました。まずは、寸法通りになる丸棒の外形を加工しました。
外形切削
次にセンタドリルと呼ばれる径の小さいドリルで、ドリルの貫通穴をあけるための下穴をあけていきます。
センタドリルによる加工
貫通穴は6mmと12mmの2回に分けて、穴あけを行いました。
6mmの穴あけ
12mmの穴あけ
最後に20mmと25mmのドリルで決まった深さに加工して、材料の内側に段差をつけました。
ドリルで段差をつける様子
次回は12/15(水)に生産機械科2年の機械仕上実習において、今回加工したドリル穴にめねじを切り、土台部分が完成する様子をご紹介いたします。
工業技術コンクール
工業技術コンクール (電子科)
日 時 : 令和2元年12月7日(月) 3h~6h 電子科実習室
工業技術コンクールは、毎年3年生が3年間の集大成として実施しています。
今年度の工業技術コンクールの課題は、3つのテーマに絞り、電気の基礎・基本
を中心に下記のような課題を実施しました。
(1) Arduinoプログラム作成及びExcelの表計算


(2) オシロスコープよる波形観測測定
波形を出力し、波形のそれぞれの値を計算する


(3) 電気工事単位作業
電気工事の配線・施工方法等


生産機械科 飛沫防止マウスシールド寄贈
益子町立七井中学校へマウスシールドを寄贈しました
本日12月4日(金)は、生産機械科3年生が課題研究で3Dプリンタを使用し製作したスマイルマスク(マウスシールド)を益子町立七井中学校へ寄贈してまいりました。

七井中学校小松﨑校長先生への寄贈の様子
お忙しいところご対応頂きありがとうございます。
是非、HR担任の先生方に使用して頂き、教育活動の一助になれればと思います。
本日12月4日(金)は、生産機械科3年生が課題研究で3Dプリンタを使用し製作したスマイルマスク(マウスシールド)を益子町立七井中学校へ寄贈してまいりました。
七井中学校小松﨑校長先生への寄贈の様子
お忙しいところご対応頂きありがとうございます。
是非、HR担任の先生方に使用して頂き、教育活動の一助になれればと思います。
生産機械科3年 実習紹介
生産機械科3年 実習紹介
本日11/30(月)は生産機械科3年生で実習が行われました。
いよいよ高校生活で最後の実習となります!
今回は「材料計測実習」4週目の様子をご紹介します。
3週目は金属材料の引張試験実習です。
2年生時の溶接実習では自分でガス・アーク溶接で接合した板材の引張試験を行いました。(こちら)
この実習では1年生時に工業技術基礎の「旋盤作業」実習(4週目、5週目、6週目)で製作した自分の4号試験片を使用し、引張試験機でちぎれる(破断する)まで引っ張ります。
引張試験機
材料を引っ張ると材料の内部に抵抗力が発生します。この抵抗力を断面積で割った値を応力といいます。
また、引っ張ることで伸びた長さを元の長さで割った値をひずみといいます。
荷重と伸びの関係をグラフ化したものが「荷重-伸び線図」です。
荷重と伸びは試験片の長さや太さで値が変化してしまうので、応力とひずみでグラフ化したものを「応力-ひずみ線図」

荷重-伸び線図 応力-ひずみ線図
試験前の準備として試験後に伸びた長さを計測できるよう試験片に基準をけがき、ポンチを打っていきます。

基準のけがき作業
ポンチ打ち作業
引張試験中は試験機の針が「荷重-伸び線図」のように動いていくので、各ポイント(上降伏点、下降伏点、最大荷重点、破断点)の数値を計測していきます。(上記のグラフでのA、B、D、E点です。)
破断する際は、とても大きな音が鳴るので実験も盛り上がります。
引張試験計測中
4号試験片(上:破断後、下:試験前)
引張試験後に破断した材料の長さと面積を計測し、伸びと絞り(断面の縮小した割合)を求めます。
最後に計測した値で自分で製作した4号試験片の「荷重-伸び線図」も作成します。
以上で3年生の実習は終わりになりますが、12/14(月)に技術コンクールがありますので後ほどご紹介いたします。
次回は12/8(火)に生産機械科2年生の実習を紹介いたします。




生産機械科 飛沫防止マウスシールド寄贈
茂木町立茂木中学校へマウスシールドを寄贈しました
本日11月27日(金)は、生産機械科3年生が課題研究で3Dプリンタを使用し製作したスマイルマスク(マウスシールド)を茂木町立茂木中学校へ寄贈してまいりました。

茂木中学校稲葉校長先生への寄贈の様子
訪問させていただき恩師に、近況報告もできました。お忙しいところご対応頂きありがとうございます。
是非、HR担任の先生方に使用して頂き、教育活動の一助になれればと思います。
本日11月27日(金)は、生産機械科3年生が課題研究で3Dプリンタを使用し製作したスマイルマスク(マウスシールド)を茂木町立茂木中学校へ寄贈してまいりました。
茂木中学校稲葉校長先生への寄贈の様子
訪問させていただき恩師に、近況報告もできました。お忙しいところご対応頂きありがとうございます。
是非、HR担任の先生方に使用して頂き、教育活動の一助になれればと思います。


真心工房のご案内

お知らせ
学校案内パンフレット完成しました。こちらをご覧ください。
(女子向けパンフ監修:宇都宮メディア・アーツ専門学校ビジュアルデザイン科)
女子生徒向け↓
一般向け↓

真工高の四季