
文字
背景
行間


真岡工業高校NEWS
生産機械科マウスシールド
マウスシールド製作 飛沫防止対策
生産機械科の3年生が課題研究で3Dプリンタを使用しスマイルマスク(マウスシールド)を設計・製作しました。
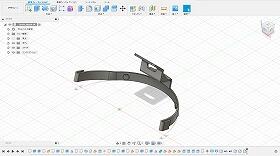
3D CADを使用し設計
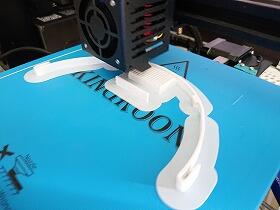
3Dプリンタで製作

完成したマウスシールド(正面)

完成したマウスシールド(横)

校名と科名を印字
生産機械科3年生の出身中学校へ寄贈し、恩師の先生方に使っていただければと、生徒たちが考案し製作しました。今後、真岡市内の中学校へ連絡を取らせていただき配布できればと考えています。本校では、実習や教室での座学において、機械系の職員が活用しています。声がこもらず生徒への指示や説明がしやすく大変助かっています。
生産機械科の3年生が課題研究で3Dプリンタを使用しスマイルマスク(マウスシールド)を設計・製作しました。
3D CADを使用し設計
3Dプリンタで製作
完成したマウスシールド(正面)
完成したマウスシールド(横)
校名と科名を印字
生産機械科3年生の出身中学校へ寄贈し、恩師の先生方に使っていただければと、生徒たちが考案し製作しました。今後、真岡市内の中学校へ連絡を取らせていただき配布できればと考えています。本校では、実習や教室での座学において、機械系の職員が活用しています。声がこもらず生徒への指示や説明がしやすく大変助かっています。
生産機械科1年「制御・マイコン」実習1~3週目
生産機械科工業技術基礎紹介
1年生工業技術基礎、「制御・マイコン」実習の1~3週目の様子をご紹介します。
「制御・マイコン」実習の前半(1~3週目)では、制御の基本を学ぶために有接点によるシーケンス制御を学習します。シーケンス実習装置と電磁リレーを用いて簡単なリレー回路を自分で組めるように学習していきます。

シーケンス実習装置
1週目ではa接点、b接点の動作について学んだ後、各接点を使用したパイロットランプの点灯回路を作成します。写真はボタンを押すと緑色と橙色のパイロットランプが点灯している様子です。

パイロットランプが点灯する様子
2週目では電磁リレーの動作について学んだ後、電磁リレーを使用したパイロットランプの点灯回路を作成します。電磁リレーを使用すると複数の動作を1度で制御することができます。回路が複雑になるほど混乱する生徒が多いため、指さし確認を行いながら図面をみて上から順番に回路を組むよう指導していきます。
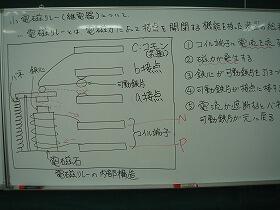
電磁リレー内部の説明
電磁リレーを使用した回路
3週目では電磁リレーを使用した自己保持回路とインタロック回路について学びます。どちらも家電製品や工場などの生産機械には欠かすことの出来ない回路です。これらを組み合わせて動作に優先度をつけることで、「扉が開いている間は操作できない」等の複雑な回路を作ることができ、ヒューマンエラーや事故を未然に防止することにつながります。
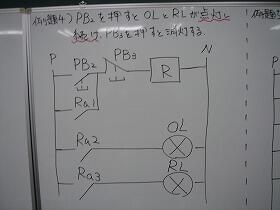
自己保持回路の例題
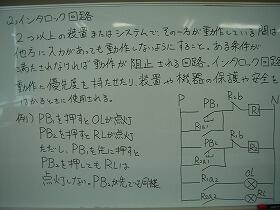
インタロック回路の例題
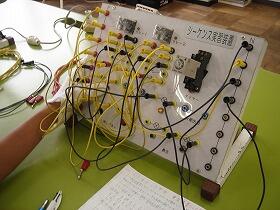
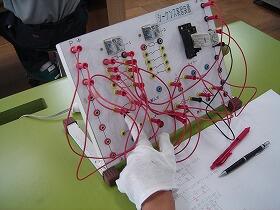
電磁リレーを2個用いた配線の様子
3週目になると生徒は自分で回路を考え、難しい回路も配線できるようになります。
以上が「制御・マイコン」実習前半(1~3週目)の内容です。
後半では「電気」実習で製作したミニマイコンカーを制御していきます。
1年生工業技術基礎、「制御・マイコン」実習の1~3週目の様子をご紹介します。
「制御・マイコン」実習の前半(1~3週目)では、制御の基本を学ぶために有接点によるシーケンス制御を学習します。シーケンス実習装置と電磁リレーを用いて簡単なリレー回路を自分で組めるように学習していきます。
シーケンス実習装置
1週目ではa接点、b接点の動作について学んだ後、各接点を使用したパイロットランプの点灯回路を作成します。写真はボタンを押すと緑色と橙色のパイロットランプが点灯している様子です。
パイロットランプが点灯する様子
2週目では電磁リレーの動作について学んだ後、電磁リレーを使用したパイロットランプの点灯回路を作成します。電磁リレーを使用すると複数の動作を1度で制御することができます。回路が複雑になるほど混乱する生徒が多いため、指さし確認を行いながら図面をみて上から順番に回路を組むよう指導していきます。
電磁リレー内部の説明
電磁リレーを使用した回路
3週目では電磁リレーを使用した自己保持回路とインタロック回路について学びます。どちらも家電製品や工場などの生産機械には欠かすことの出来ない回路です。これらを組み合わせて動作に優先度をつけることで、「扉が開いている間は操作できない」等の複雑な回路を作ることができ、ヒューマンエラーや事故を未然に防止することにつながります。
自己保持回路の例題
インタロック回路の例題
電磁リレーを2個用いた配線の様子
3週目になると生徒は自分で回路を考え、難しい回路も配線できるようになります。
以上が「制御・マイコン」実習前半(1~3週目)の内容です。
後半では「電気」実習で製作したミニマイコンカーを制御していきます。
生産機械科1年「制御・マイコン」実習4週目
生産機械科工業技術基礎紹介
本日10/2(金)は生産機械科1年生で工業技術基礎が行われました。今回から各テーマ後半の内容に入っていきます。今回は「制御・マイコン」実習の4週目の様子をご紹介します。
「制御・マイコン」実習の前半(1~3週目)では、制御の基本を学ぶために有接点によるシーケンス制御を学習しました。後半では別の実習室に移動し、「電気」実習で製作したミニマイコンカーの制御を学習します。※後半実習を行う部屋では感染症飛沫防止の為の生徒間にパーテーションを取り付けています。

内容説明の様子
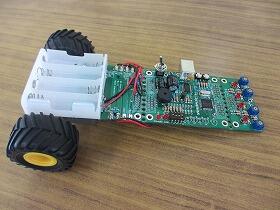
製作したミニマイコンカー
初回の班はローテーションの関係上、自分の身にマイコンカーが完成していないため先輩が製作したミニマイコンカーを用いて学習を行いました。まず初めにミニマイコンカーの各部名称及び機能と、プログラムの学習を行います。
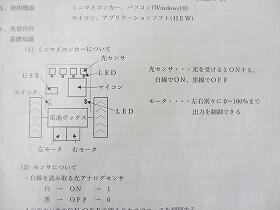
各部名称の説明
プログラムの構成を学んだところで、実際にコース上(直線1M)を走らせて動作確認を行います。同じように作られたマシンでも同じ動作はしないため、1台1台の特徴に合わせコースアウトしないよう左右のモータ出力を調整していきます。

コースを走らせる様子①

コースを走らせる様子②
調整の上手な生徒や、左右モータの差が少ないマシンは2M直線までクリアすることが出来ました。試行錯誤しながら微調整を繰り返す様子を見ることが出来ました。
次回投稿は10/9(金)に生産機械科1年生の工業技術基礎を紹介いたします。
生産機械科2年 MC実習 3週目
生産機械科2年実習紹介
本日9/29(火)は生産機械科2年生で実習が行われました。今回は「MC実習」3週目の様子をご紹介します。
今回は過去の実習で学んだ内容を応用して、真円を切削するプログラムについて学習しました。
下図のように切削を始める位置によってプログラムが変化することを確認しながら、プログラムを検討しました。
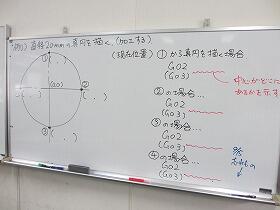
プログラムの説明
次に、円弧と真円を組み合わせて、下図のような図形のプログラムについて検討しました。前回の内容も含まれている課題ですので、生徒も前回の実習報告書(実習ノート)を見て、思い出しながら取り組みました。
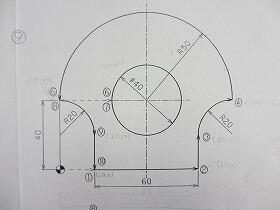
円弧と真円を応用した課題
3週目ということもあり、パソコンの使い方や、プログラム言語にも慣れてきた様子でした。
後半に行うMC実習(3週)では生徒が自ら考えたデザインをアルミ二ウムの板材に切削します。

プログラムを考える様子
次回は10/2(金)に生産機械科1年の工業技術基礎についてご紹介します。
本日9/29(火)は生産機械科2年生で実習が行われました。今回は「MC実習」3週目の様子をご紹介します。
今回は過去の実習で学んだ内容を応用して、真円を切削するプログラムについて学習しました。
下図のように切削を始める位置によってプログラムが変化することを確認しながら、プログラムを検討しました。
プログラムの説明
次に、円弧と真円を組み合わせて、下図のような図形のプログラムについて検討しました。前回の内容も含まれている課題ですので、生徒も前回の実習報告書(実習ノート)を見て、思い出しながら取り組みました。
円弧と真円を応用した課題
3週目ということもあり、パソコンの使い方や、プログラム言語にも慣れてきた様子でした。
後半に行うMC実習(3週)では生徒が自ら考えたデザインをアルミ二ウムの板材に切削します。
プログラムを考える様子
次回は10/2(金)に生産機械科1年の工業技術基礎についてご紹介します。
生産機械科3年 機械仕上実習 2週目
生産機械科3年 実習紹介
本日9/28(月)は生産機械科3年生で実習が行われました。今回は「機械仕上実習」2週目の様子をご紹介します。
前回の実習で外径切削を行った材料をひっくり返し、裏側に段をつける端面切削を行いました。
端面切削の後に角を少し丸めるために面取りという加工を行いますが、どうしてもバリがでるため前回穴をあけたところに更にリーマという仕上加工を行います。

端面切削の様子

リーマをかける様子
今回は旋盤の他に、フライス盤の実習も行いました。
フライス盤は、エンドミルをいう刃を回転させ材料に押し当てることで、削り加工をする機械です。
金属の角材を六面削る練習を行いました。

フライス盤加工の様子
次回は9/29(火)に生産機械科2年生の実習を紹介いたします。
生産機械科1年「電気」実習3週目
生産機械科工業技術基礎紹介
本日9/25(金)は生産機械科1年生で工業技術基礎が行われました。今回は「電気」実習の3週目の様子をご紹介します。
「電気」実習の3週目では、前回抵抗器をハンダ付けした基板を用いて、更にコンデンサ等別の電子部品をハンダ付けしていきます。前回に引き続き、高温となるハンダ小手の取り扱いに注意しながら、細かい作業に集中して取り組んでいきます。

作業説明の様子
最初に電子部品を仮止めした基板を暖め、そこにハンダを溶かして落とすと仕上がり良くハンダ付けが出来ます。生徒は何度も失敗しながらハンダ付けの技術を学んでいました。

ハンダ付けを行う様子
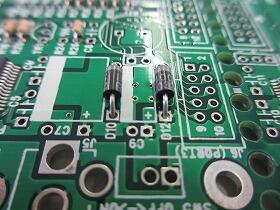
今回取り付けた部品
ここまでが「電気」実習前半の内容となります。
後半では「制御・マイコン」実習において、作成したマイコンカーを制御していきます。
次回投稿は9/28(月)に生産機械科3年生の実習を紹介いたします。
キャリア形成支援事業【建設科】
令和2年度キャリア形成支援事業の実施【建設科2年】








10月17日(木)、本校を会場にキャリア形成支援事業を実施しました。
今年度は『専門工事業の理解』をテーマに、5業種の技術者の方々を招き、班ごとの体験活動をさせていただきました。
全員がそれぞれの分野の仕事を体験し、専門工事の魅力と職人の方々の技術を身近に感じることができた充実した活動となりました。
【参加業者】
・株式会社大勝建設:足場工事
・株式会社英和技研:左官工事
・長谷川建設株式会社:型枠工事
・株式会社カネダ:鉄筋工事
・株式会社大場工業:鉄筋工事
・株式会社石野内装:内装工事
【生徒のコメント】
今回、私達はこの「キャリア形成支援事業」を通して、職人さんのすばらしさや、仕事の大変さ、そして上手に出来たときの「やりがい」や「楽しさ」を感じることができました。この体験を活かし、学校生活や今後の就職活動に励んでいきたいと思います。
建設科2年 蓬田大輝




技術者倫理・安全教育講話
投稿日時 : 2020/09/18
 建設科
建設科
技術者倫理・安全教育を実施
令和2年9月18日(金)1~3時限目を用いて、建設科1年生を対象に「技術者倫理・安全教育」を実施しました。
工業の世界を目指すものにとって大切な倫理観や安全に対する意識の向上を促しました。自らの考えを深め、他者の意見を聞く場面もあり、有意義な時間となりました。



令和2年9月18日(金)1~3時限目を用いて、建設科1年生を対象に「技術者倫理・安全教育」を実施しました。
工業の世界を目指すものにとって大切な倫理観や安全に対する意識の向上を促しました。自らの考えを深め、他者の意見を聞く場面もあり、有意義な時間となりました。
生産機械科1年「電気」実習2週目
生産機械科工業技術基礎紹介
本日9/18(金)は生産機械科1年生で工業技術基礎が行われました。今回は「電気」実習の2週目の様子をご紹介します。
「電気」実習の2週目である今回は、ミニマイコンカーを制御するために必要な基板を用いて、抵抗器の基礎的な知識とハンダ付けの技術を学びます。抵抗器は様々な種類があり、カラーコードと呼ばれる色で抵抗値を判断します。すべて覚えるのは大変ですが電子機器には欠かすことの出来ない要素のため、しっかりと学んでいきます。
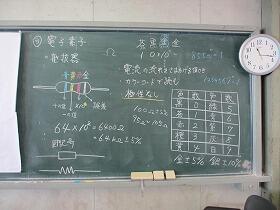
抵抗器の基礎知識について
抵抗器の基礎を学んだところで実際にマイコンカーの基板に抵抗器を取り付けます。とても細かい作業なので、ハンダこてでハンダを溶かしながら慎重に行っていきます。今回の実習で初めてハンダこてを使用する生徒も多く、火傷をしないように十分注意しながら作業を行いました。
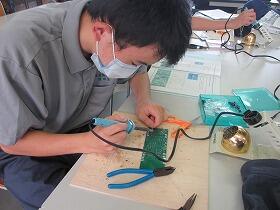
ハンダ付けを行う様子
3週目では完成したギヤボックスと基盤を用いてマイコンカーを仕上げていきます。
次回投稿は9/25(金)に生産機械科1年生の実習を紹介いたします。
生産機械科3年 自動制御実習 4週目
生産機械科実習紹介
本日は生産機械科3年「自動制御実習」の4週目についてご紹介します。この実習では、「PLCを用いたシーケンス制御」と「ロボットアームの制御」について1つの班が2手に分かれて実習を行いました。
今回はロボットアームの制御についてご紹介いたします。本校の生産機械科では、EPSON製のロボットアームを用いて実習を行います。
下図のようにポイントをいくつか設定し、順番にポイントからポイントへ移動する「PTP制御」(Point to Point 制御)という制御方法を用います。
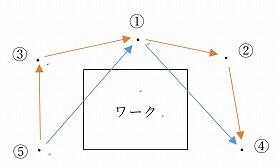
PTP制御について
ロボットアームを駆動させる6つの軸の動きを考えながら、ポイントを設定していきます。今回は下図のように、ロボットアームを用いて、ワーク(材料)を台の上からコンベアへと移動させるためのポイントを考え、プログラムしました。
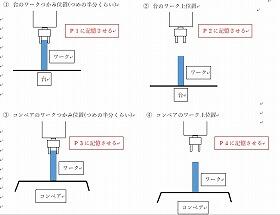
今回指示するポイントについて
ロボットアームやコンベアなどの生産機械を自ら制御することによって、生産システムの自動化について理解を深めた様子でした。

ロボットアームの軸について検討する様子
本日は生産機械科3年「自動制御実習」の4週目についてご紹介します。この実習では、「PLCを用いたシーケンス制御」と「ロボットアームの制御」について1つの班が2手に分かれて実習を行いました。
今回はロボットアームの制御についてご紹介いたします。本校の生産機械科では、EPSON製のロボットアームを用いて実習を行います。
下図のようにポイントをいくつか設定し、順番にポイントからポイントへ移動する「PTP制御」(Point to Point 制御)という制御方法を用います。
PTP制御について
ロボットアームを駆動させる6つの軸の動きを考えながら、ポイントを設定していきます。今回は下図のように、ロボットアームを用いて、ワーク(材料)を台の上からコンベアへと移動させるためのポイントを考え、プログラムしました。
今回指示するポイントについて
ロボットアームやコンベアなどの生産機械を自ら制御することによって、生産システムの自動化について理解を深めた様子でした。
ロボットアームの軸について検討する様子


真心工房のご案内

お知らせ
学校案内パンフレット完成しました。こちらをご覧ください。
(女子向けパンフ監修:宇都宮メディア・アーツ専門学校ビジュアルデザイン科)
女子生徒向け↓
一般向け↓

真工高の四季